Automation
Stability Control
The FUSION is designed to be an intuitive system that increases the capability of any operator. This is accomplished by incorporating clever control and navigation algorithms that utilize vehicle dynamics, thruster maps, and onboard sensor data effectively. The result is an underwater vehicle with an intelligent control system that maximizes simple and complex missions.
When idle in the water the FUSION maintains position and attitude including roll stabilization, yaw control, and depth/altitude hold. As commands are given to the FUSION either through manual operator input or waypoint navigation the FUSION responds accordingly and when complete returns to position hold.
Operational Modes
The operator has the ability to quickly switch between different operational modes depending on conditions, missions, or preference. Auto, Stability, and Manual modes are available.
AUTO – full auto will make the FUSION hold position and attitude without input from the operator. The operator is then free to either manually override with the joysticks or provide an automated task such as going to the waypoint. Once manual control is stopped or the task is complete the FUSION returns to position and attitude hold.
STABILITY – should station hold not be desired switching to stability mode provides the operator with auto yaw (heading), roll, depth, and altitude. The operator is required to provide manual input to hold the position.
MANUAL – tasks where full control is required the FUSION can be set to manual, which turns off all auto functions and provides the operator with total control.
Navigation Functions
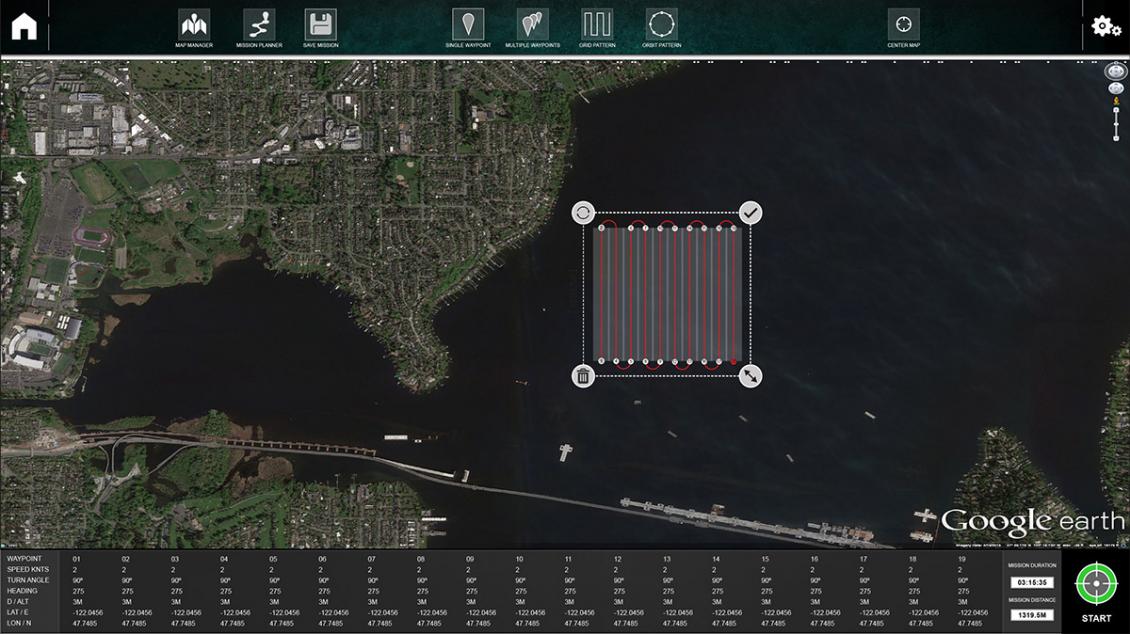
The FUSION is equipped with a complex suite of navigation tools that help operators easily plan and execute autonomous missions. Missions can be as simple as a single go-to waypoint or more complex grid and orbit patterns. Easily link waypoints and patterns to custom tailor the mission to the exact mission requirements. For each waypoint, a variety of parameters can be set including altitude, imaging data collection, heading, and more. Explore the user interface to learn more about planning missions.
Since the FUSION is a vectored thruster vehicle complex maneuvers are possible and also more efficient. Add the real-time positional correction and the FUSION can remain at depth throughout the entire mission.