HMI
Human Machine Interface (HMI)
The FUSION HMI is another welcome approach to improving operator control and interaction. At the core of the HMI is a ruggedized Android-based tablet that contains the user interface for complete control of the FUSION. Sunlight-readable touchscreen displays can be operated in harsh conditions and even with gloves. Program a mission with the detachable keyboard or just the touch screen and then wirelessly transmit to the FUSION.
For ROV operations a detachable control dock including joysticks, thumb wheels, and hotkeys are included. The hotkeys provide quick access to common functions and all controls can be custom configured to individual operator preferences.

User Interface (UI)
Maintaining the intuitive approach is the FUSION user interface. The simple-to-understand interface makes even the most novice operators comfortable in planning missions, conducting ROV operations, analyzing data, or sharing files. Great care was taken to simplify the display and help operators focus on what is important. The touch screen makes selection simple and right at their fingertips.

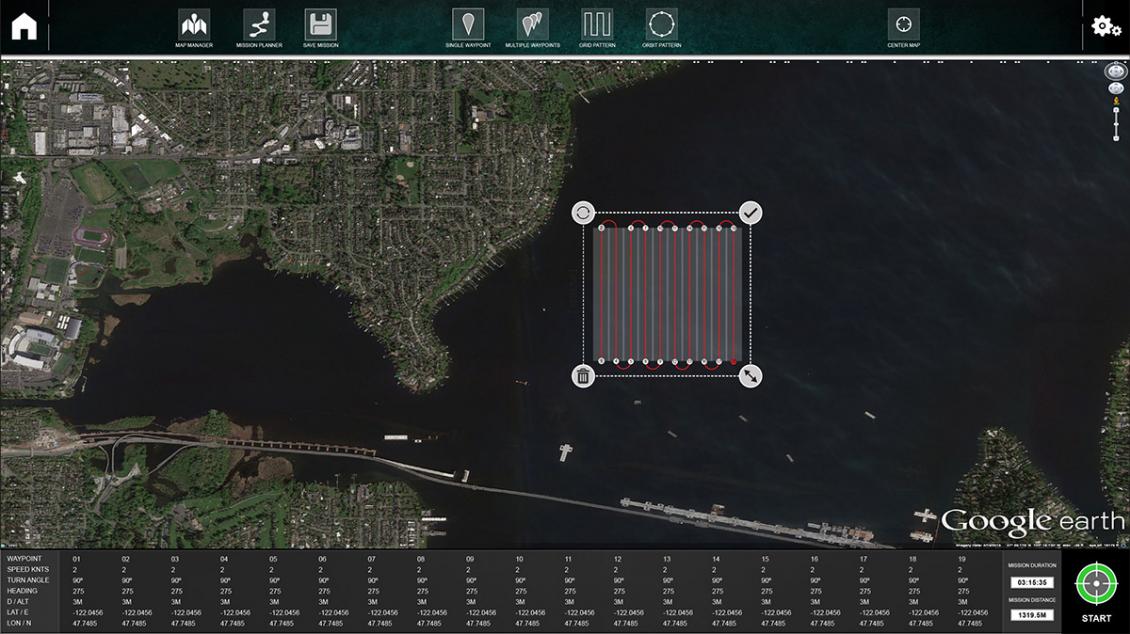
Mission Planning
Operators can quickly plan AUV missions with an intuitive interface. Add waypoints, set up grid patterns, or create an orbit around a particular target of interest with simple click-and-drop controls. For each waypoint unique parameters can be set such as which sensors to use, vehicle direction, speed, and altitude. The touch screen is very simple to use and can be done quickly on the fly.
Multiple missions can be set up, saved in the user interface, and easily accessed when needed. Other operators can share mission files to be used as the basis for planning new missions. Google Maps is used as a base map (when an internet connection is available) with the ability to add other layers like charts, sonar mosaics, or geo-referenced images.
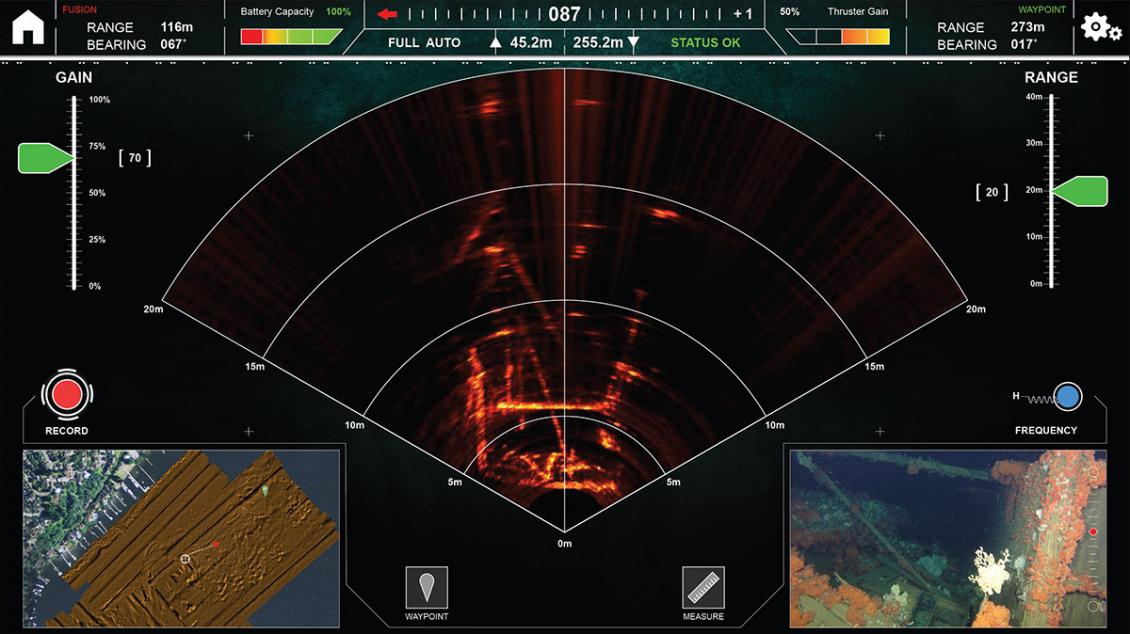
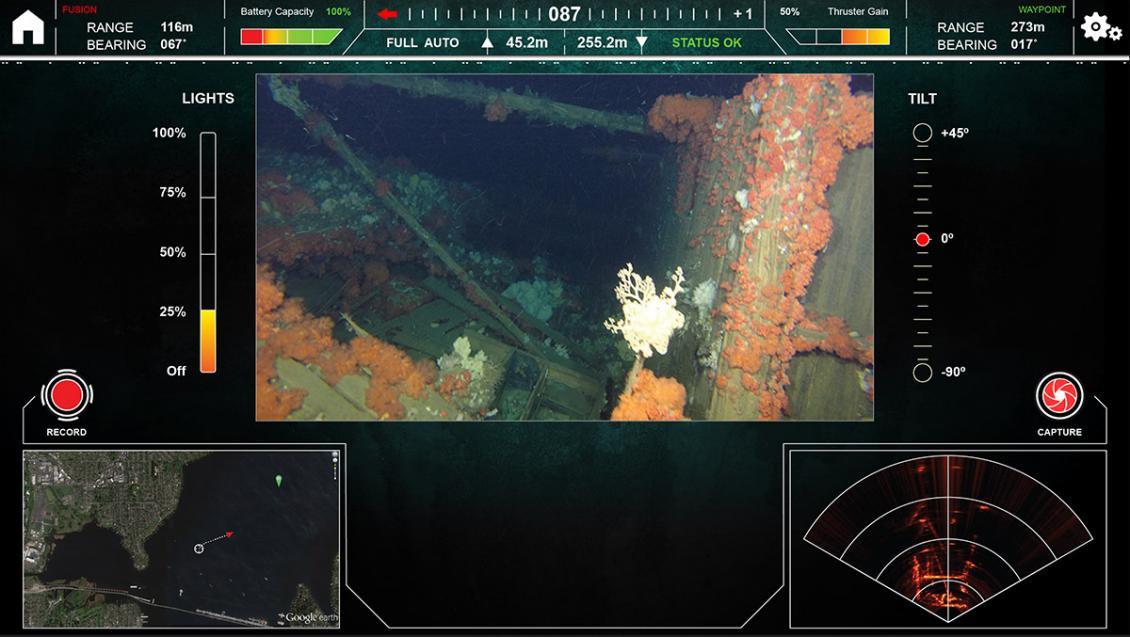
ROV Mode
ROV mode layout includes three primary windows – sonar, video, and navigation. At the top of the screen is an information bar with all the key information during missions. Simply tap on the different windows to make them prominent depending on what the conditions demand. Slide across from the right to view the side scan waterfall or slide from the left to see vehicle data.
Automated missions such as search patterns can be loaded from the mission planner and executed in ROV mode for real-time data feedback.
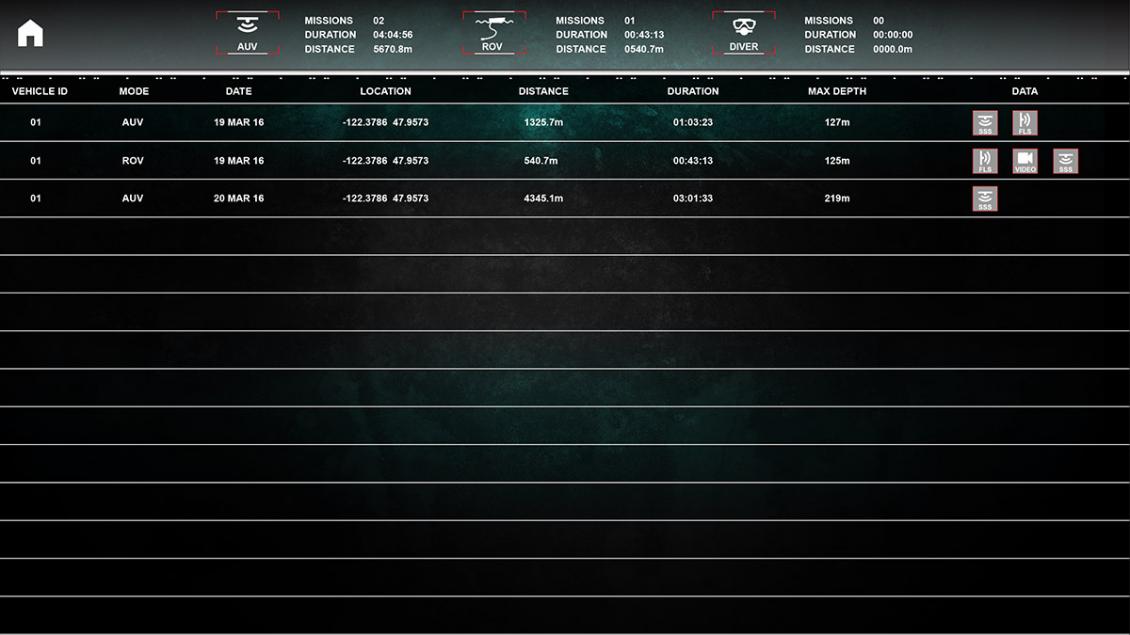
Data Management
Managing mission data such as video, sonar, and navigation has never been easier with the FUSION. Each mission creates a data set linking all collected data. The log files can then be replayed on the HMI, synchronized with a server for shared access, or exported in a platform-agnostic format. Teams can be spread out and still easily share data for various mission planning.
Take a previously conducted AUV mission and use the collected data as the foundation for an ensuing ROV mission all without complex export/import processes. Detailed information for each mission is collected and provides an easy way to manage operational time and maintenance.