















Modes
FUSION Multi-mode System
The FUSION is a multi-mode or hybrid underwater vehicle that combines three commonly used functions – AUV, ROV, and DIVER into a single system. This approach has a number of valuable features that help to simplify, reduce cost, improve efficiency and increase capability. Hybrid does not have to mean compromise as evident in the FUSION’s capability.
With the multi-mode capability, operators have a broad range of options to conduct missions. Send the FUSION out on a large search mission in AUV mode to collect high-resolution side-scan, multi-beam, and/or video data. Once the mission is complete all data is quickly available for analysis to plan the next operation. The next operation can be in ROV mode by simply connecting the tether or when diver interaction is preferred add the diver module. Either mode takes only minutes to configure. Further simplifying operations is the common user interface that provides seamless transfer of data between missions.
Autonomous Underwater Vehicle
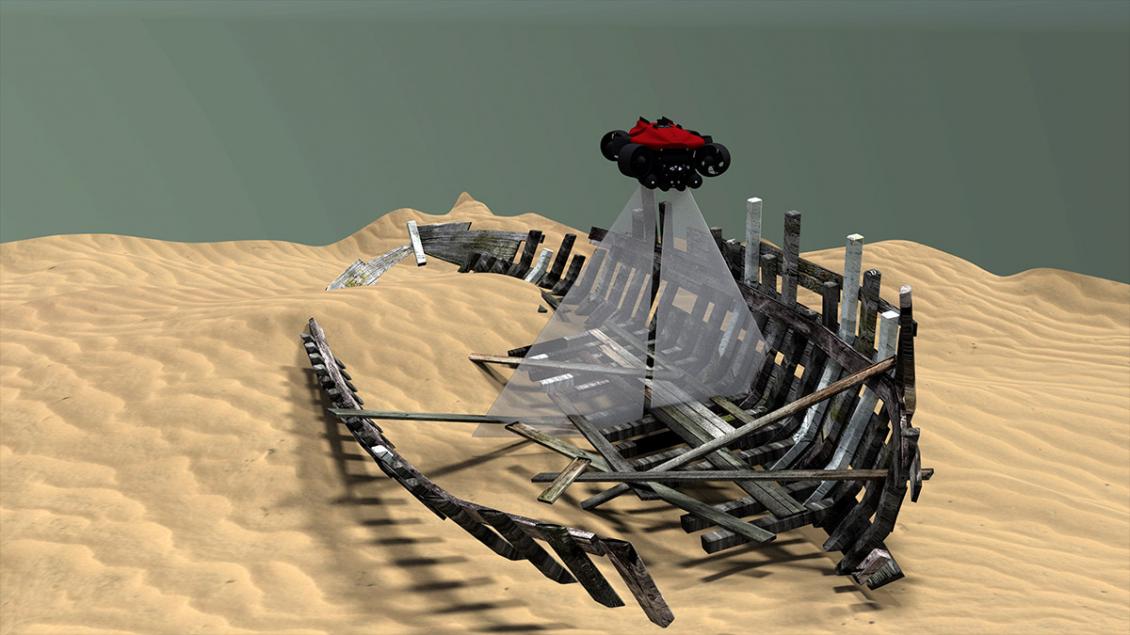
FUSION is a fully autonomous vehicle that can be programmed to conduct a wide range of missions using an array of onboard imaging sensors. Program complex missions to collect high-resolution side-scan sonar data, forward-looking multi-beam sonar data, and/or high definition video with the maneuverability of a vectored thruster vehicle. To top it off missions are easily planned using the intuitive mission planner in the user interface.
Ensuring accurate data collection the FUSION is equipped with high accuracy navigation sensors including Doppler Velocity Log, Attitude Heading Reference System, Altimeter, Global Positioning System, Ultra Short Baseline system, Pressure sensor, and Temperature sensor. When the FUSION is operating in AUV mode the USBL positioning system is active providing real-time positional corrections and aiding the onboard navigation sensors. This feature allows the FUSION to conduct large area search missions without resurfacing and with great accuracy and reduced mission time. An added benefit of the USBL system is the ability for the operator to communicate with the FUSION during a mission. With a coms link operators can alter missions, abort missions or check mission status.
Remotely Operated Vehicle
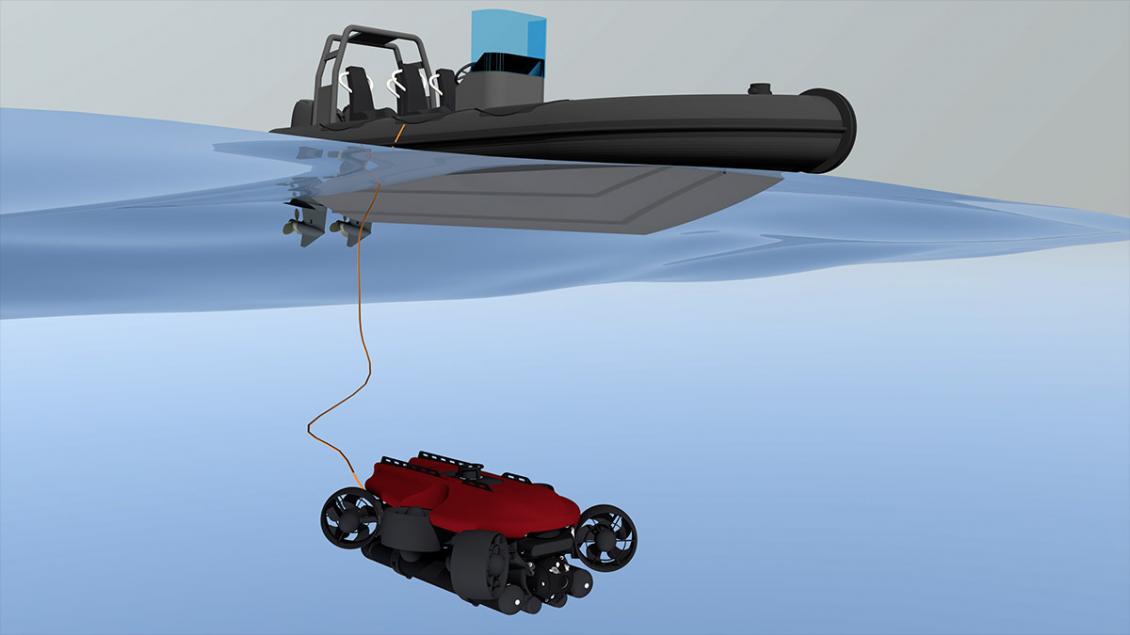
The FUSION is a highly capable ROV system that provides real-time sensor feedback to the surface by simply connecting the small diameter tether. Use ROV mode to follow up on targets identified in AUV mode or simply as an inspection tool. When in ROV mode the FUSION has the same level of autonomy as AUV mode, but with the benefit of live data transmission.
Highly maneuverable and stable with the six thruster configuration and optimized mechanical design. The powerful thrusters and clever control system provide precise maneuverability in demanding conditions all with minimized drag influence from the small tether. With 500 meters included and 2,000 meters optional, the FUSION has extended range capabilities in ROV mode.
The intuitive Human Machine Interface (HMI) has complete controls for the FUSION including manual and automated controls. Data that was collected in AUV mode is easily accessed in ROV mode through the common user interface.
DIVER Navigation & Propulsion
Expanding on the multi-mode capability of the FUSION is the ability to use the vehicle as a navigation and propulsion vehicle for divers. The quick addition of the Diver Module to the rail system on the FUSION provides divers with a large format screen, menu buttons, and thruster control.
Tied into the core of the FUSION system the diver module seamlessly accepts data collected during AUV or ROV missions including waypoints. Divers are able to use the FUSION to navigate to predetermined waypoints using the onboard navigation sensors as well as real-time correction through the USBL. For low visibility operations, the high-resolution forward-looking sonar provides long-range detection capability.
Not only is the FUSION a valuable navigation and sonar aid to divers, but also a propulsion device. The powerful thrusters are easily controlled through the handgrip triggers. Divers can adjust the level of propulsion with the quick menu settings on the diver module screen.
